


SILIKON 3D-Druck
Hast du schon von Soft-Robotik gehört?
Diese neuen (Soft)- Roboter sind verformbar, flexibel und weich.
Sie haben das Zeug dazu, die Industrie 4.0 maßgeblich zu verändern.
Erfahre hier im Blog-Artikel, wie der 3D-Druck von Silikon einen echten Vorteil für die Soft-Robotik darstellen kann und wie das Schneider Electric Openlab Soft-Robotik mit dem Lynxter S600D zur Herstellung des Prototyps eines Greifers verwendet.
Vorteile von 3D-gedrucktem Silikon für die Soft-Robotik
Was ist Soft-Robotik?
Die Soft-Robotik ist eine Technologie, die sich mit der Entwicklung von Robotern befasst, die fast vollständig "weich" bzw. "soft" sind.
Ihre Gelenke und Bewegungen sind dank der Verwendung von weichen, elastischen, biegsamen oder leicht verformbaren Strukturen und Materialien flexibel.
So weit, so großartig. Wie jedoch, sah der Weg bis hierhin aus?
Der Bereich der Soft-Robotik ist das Ergebnis einer natürlichen Weiterentwicklung der Robotik. Sie entstand mit der Entwicklung technischer Silikone und innovativer Verfahren wie der Revolution des 3D-Drucks.
Diese Lösungen ermöglichen es nun, die Vielfalt der Roboterbewegungen durch die Integration mechanischer Bewegungen wie Stauchen, Dehnen, Abwickeln und Anschwellen erheblich zu erweitern. Roboter verfügen daher über eine flexiblere und weichere Bewegungsmechanik. Einige Roboter können zum Beispiel die wellenförmigen und verdrehten Bewegungen von Tentakeln nachahmen.
Die Manipulation von Objekten ist damit präziser und kontrollierter.
Softroboter minimieren das Risiko von Gefahren und Schäden an Objekten während des Eingriffs drastisch. Diese Lösung eignet sich hervorragend für die Interaktion mit instabilen oder unsicheren Umgebungen sowie für die Handhabung zerbrechlicher Objekte, z. B. in der Lebensmittel-, Raumfahrt- oder Medizinrobotik.
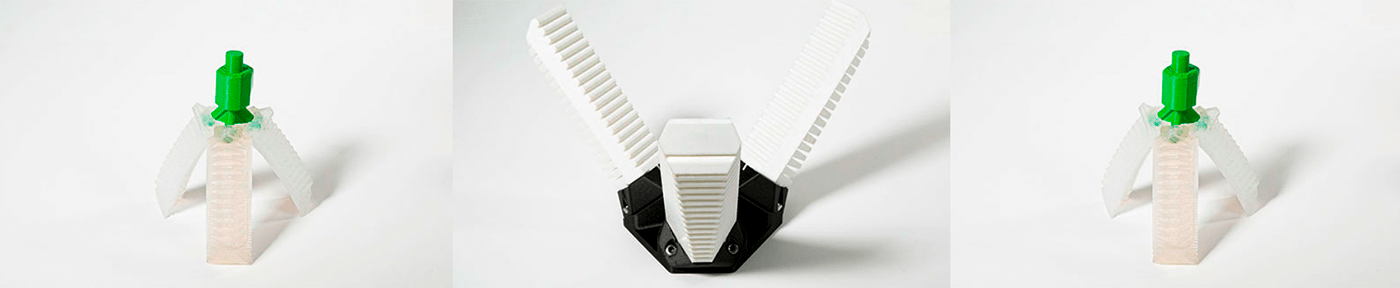
 Soft-Robotik-Prototyp – Greifer, hergestellt vom F&E-Team bei Lynxter
Soft-Robotik-Prototyp – Greifer, hergestellt vom F&E-Team bei Lynxter
Anwendungen in der Softrobotik
Die Soft-Robotik gilt heute als ein neues Verfahren innerhalb der Robotik. Obwohl sich diese Soft-Roboter im Wesentlichen im Stadium des Prototyps oder eines vertraulichen Projekts befinden, stellen sie einen signifikanten Fortschritt in Bezug auf Sicherheit, Robustheit und Kostenreduzierung dar.
Sie sind kostengünstig herzustellen und bieten noch nie dagewesene Vielseitigkeit und Flexibilität.
Die Soft-Robotik wird jetzt für Operationen erprobt, bei denen ein hohes Maß an Präzision in heiklen Umgebungen erforderlich ist, wie zum Beispiel bei bestimmten mikrochirurgischen Eingriffen. Miniaturroboter bahnen sich ihren Weg in schwierige Bereiche und können Medikamente an präzise Stellen bringen. Soft-Roboter können also in Kontakt mit Geweben und Zellen kommen, ohne diese zu beschädigen.
Diese Technologie kann auch bei der Erforschung von Korallenriffen eingesetzt werden, wo sanfte Bewegungen für den Erhalt der Unterwasserwelt unerlässlich sind.
Ergänzend zur aktuellen Industrierobotik ermöglichen flexible Greifer die Handhabung vieler verschiedener Arten von Gegenständen, ohne sie zu beschädigen – zum Beispiel empfindliche Lebensmittel (Obst, Gemüse, Kuchen). Ihr Design ermöglicht das Greifen von Objekten unterschiedlicher Form, Beschaffenheit, Gewicht und Volumen.
Die Fertigungsindustrie entwickelt sich derzeit in Richtung von Robotern, die eine Kollaboration zwischen Mensch und Maschine ermöglichen. Diese kollaborativen Roboter oder "Cobots" minimieren das Verletzungsrisiko für den Benutzer im Falle eines Aufpralls. Dank der Soft-Robotik können sich solche Fertigungssysteme entwickeln. Die flexiblen Konstruktionen der Cobots gewährleisten die Sicherheit sowohl der Maschine als auch des Benutzers.
 Prototyp eines Fingergreifers von Openlab – Schneider Electric
Prototyp eines Fingergreifers von Openlab – Schneider Electric
3D-gedrucktes Silikon in der Soft-Robotik
Die Soft-Robotik wird durch die Verwendung von weichen Materialien wie Silikon, Kunststoff, Gummi und anderen Polymeren und/oder durch eine leichte und flexible mechanische Struktur ermöglicht. Der Softroboter bewegt sich hauptsächlich durch die Verformung seiner Struktur.
Die Wahl des Polymers ist für seine Entwicklung und seine Funktion von entscheidender Bedeutung. Die verwendeten Materialien müssen den Bedürfnissen und Anforderungen der Umgebung entsprechen, in der sich der Roboter entwickeln soll. Das betrifft chemische Trägheit, elektrische Isolierung, Temperatur, Reibung, Kontakt mit Lebensmitteln usw.
Dieser neue Ansatz stützt sich auf eine bessere Kenntnis der flexiblen Polymermaterialien und auf 3D-Drucker, die immer leistungsfähigere Elastomere drucken können.
Mit seinen hervorragenden Isolationseigenschaften, seiner Beständigkeit gegen hohe Temperaturen und Chemikalien und vor allem seiner großen Dehnbarkeit ist Silikon ein Polymer, das in der Soft-Robotik weite Verbreitung findet.
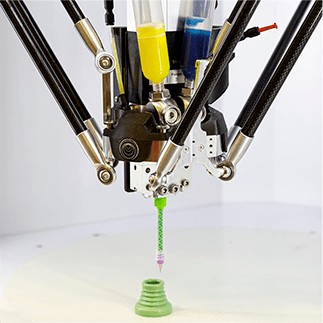
Dank des Lynxter 3D-Druckers S600D und des Werkzeugkopfs LIQ21, der flüssige Materialien druckt, kann Silikon 3D-gedruckt und in der Robotik verwendet werden.
Der 3D-Druck von Silikon ermöglicht die Herstellung neuer experimenteller Formen. Im Gegensatz zu herkömmlichen Gussverfahren können diese Silikonteile komplexe Innengeometrien (Mikrokavitäten, Waben usw.) aufweisen, die ohne 3D-Druck unmöglich wären.
Im Lynxter-Ökosystem ist bereits eine Reihe von RVT1- und RTV2-Silikonen mit einer Härte von 10 bis 40 Shore A verfügbar, die in verschiedenen Sektoren eingesetzt werden.
Die Kombination von Silikon-3D-Druck und Soft-Robotik eröffnet neue Möglichkeiten und Entwicklungen, insbesondere für Schlüsselanwendungen wie die Selbstreparatur von Robotern und die Selbstreplikation durch künstliche Intelligenz.
Die Forschungs- und Entwicklungsabteilung von Lynxter arbeitet tagtäglich an der Entwicklung und Umsetzung von Elastomeren mit neuen Eigenschaften. Der 3D-Druck von Teilen, die sowohl hart als auch verformbar sind, ermöglicht es nun, Flexibilität und Widerstandsfähigkeit mit Verformung zu kombinieren. Das erleichtert die Entwicklung einer neuen Generation von Soft-Robotern.
Prototyp eines Greifers von Openlab – Schneider Electric
Silikon-3D-Druck in angewandter Praxis bei Openlab Soft Robot – Schneider Electric
Ausgestattet mit zahlreichen 3D-Druckern, darunter der Lynxter S600D, führt die Prototyping-Einheit von Schneider Electric Openlab verschiedene Projekte durch. Dabei werden die Innovation neuer Produkte beschleunigt und die Rentabilität innerbetrieblicher Produktionslinien verbessert. Eines dieser Projekte zielt darauf ab, eine flexible und modulare Produktionslinie zu entwickeln, die an alle Arten von neuen Projekten und an unterschiedlich geformte Teile angepasst werden kann. Das entwickelte Modul muss auf einen Roboterarm passen, um die Sicherheit des Bedieners zu gewährleisten, der in der Nähe arbeitet. Zu diesem Zweck hat sich das Team des Schneider Electric Openlab erwartungsgemäß der Soft-Robotik zugewandt.
Das Schneider Electric Openlab hat einen Prototyp eines Silikongreifers mit mehreren "Fingern" entwickelt, der mit einem Roboterarm kompatibel ist.
Jeder Finger wird auf dem Lynxter S600D aus Silikon gedruckt, was eine schnelle Iteration des Designs und eine Änderung der Konfiguration des Greifers entsprechend dem aktuellen Produktionslinienprojekt ermöglicht.
Der industrielle 3D-Druck bietet große Flexibilität und Formfreiheit. Die Konfiguration der Baugruppe kann in wenigen Stunden geändert und verschiedene Modelle von "Silikonfingern" hinzugefügt werden. Der Produktionsprozess gewinnt sowohl an Flexibilität als auch an Modularität.
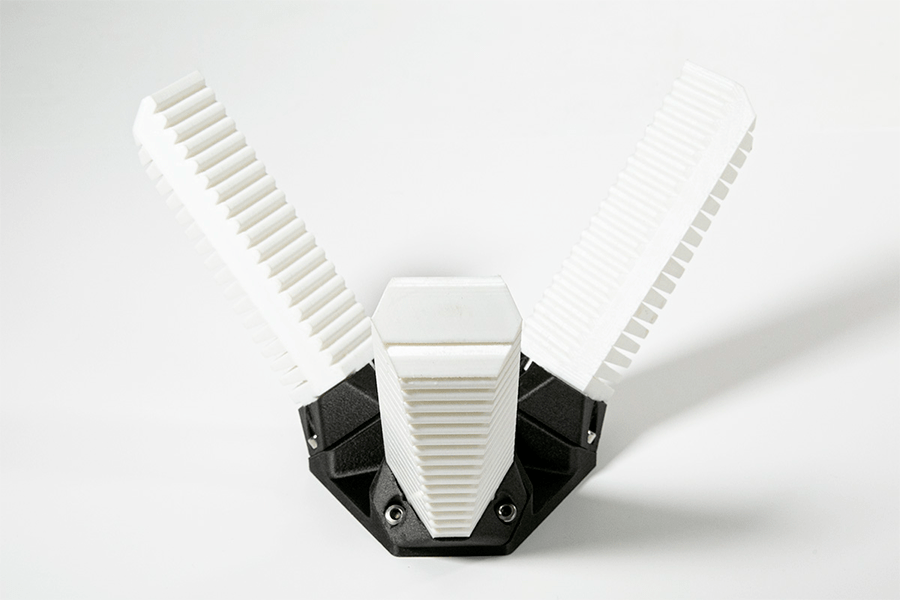
Zur Herstellung des Greifers hat das Openlab-Team zunächst ein 3D-Modell des Fingers erstellt, das für den 3D-Druck aus Silikon optimiert wurde. Dieser Finger wird mit Druckluft (ca. 0,6 bar) bewegt.
Der Finger besteht aus 2 Teilen:
- Der Hauptkörper des Fingers besteht aus einer Reihe von pyramidenförmigen Luftkammern. Diese Kammern dehnen sich beim Aufblasen aus und erzeugen so die Biegebewegung des Fingers. Die Kammern sind nach den Konstruktionsregeln für das Verfahren gestaltet.
- Die Außenseite, die den Gegenstand greifen und halten muss, ist gezahnt und hat eine breite Kerbe. Die Fingerspitze ist fest, so dass sie durch die Schwerkraft in ihre ursprüngliche Form zurückkehren kann, wenn die Luft ausgetreten ist.
 Prototyp des Greifers von Openlab – Schneider Electric
Prototyp des Greifers von Openlab – Schneider Electric
Die Finger wurden aus RTV2 40 Shore A Silikon mit dem Multi-3D-Drucker Lynxter S600D gedruckt. Dieser Prototyp des Greifers wird zunächst an der Kontrolllinie eingesetzt, bevor er optimiert und vervielfältigt wird. Der Greifer ist in der Lage, zylinderförmige Objekte von 20mm x 25mm für die Sortierung dank Videoerkennung zu greifen und auf diese Weise maschinelles Lernen für eine kontinuierlich optimierte Leistung der Produktionslinie umzusetzen.
Die Verwendung des Lynxter S600D für Soft-Robotik-Projekte bietet aufgrund der Modularität der Maschine ein hohes Maß an Reaktionsfähigkeit. Durch einfaches Auswechseln des Werkzeugkopfes kann der S600D verwendet werden, um einen neuen Greiferträger aus thermoplastischem Filament mit Silikonfingern zu drucken, so dass der Roboter seine Form schnell und einfach ändern kann.
Die Soft-Robotik ist ein sich schnell entwickelnder Bereich, der umfangreiche Forschungen über flexible und elastische Materialien und deren Verhalten erfordert. Mit dem S600D und seiner 3D-Drucktechnologie aus Silikon leistet Lynxter einen aktiven Beitrag zur Lösung dieser neuen wissenschaftlichen und technologischen Herausforderungen.
MAKE IT SMARTER
EINE MASCHINE, MEHRERE WERKZEUGKÖPFE, UNENDLICHE MÖGLICHKEITEN
LYNXTER S600D
FÜR SILIKON, KERAMIK UND THERMOKUNSTSTOFFE


Kommentar eingeben